Lidar
Projet d'acquisition Lidar temps-réel
Date
2022
Client
Youdom
Category
Desktop App
Description
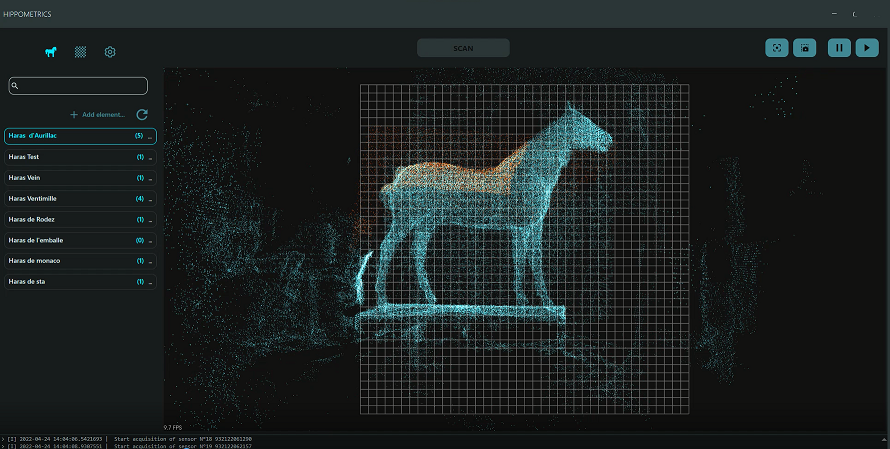
Projet d'acquisition Lidar temps-réel, sous C++20, Qt, Qml,Vtk et PCL.
L'acquisition est faite avec des caméras à détection de profondeur Intel® RealSense™
Qt est un framework de développement logiciel multiplateforme largement utilisé pour la création d'applications de bureau, embarquées, mobiles et Web. Il offre un ensemble complet de bibliothèques, d'outils de développement et de modules d'exécution qui facilitent la création d'interfaces utilisateur graphiques (GUI) et d'applications performantes. Qt est écrit en C++ et permet une programmation orientée objet avec une grande modularité.
VTK, ou Visualization Toolkit, est une bibliothèque logicielle open source pour la visualisation 3D interactive et l'analyse de données. Écrite en C++, VTK propose un ensemble robuste d'algorithmes pour la modélisation géométrique, le traitement d'images, le rendu graphique et la visualisation de données.
PCL, ou Point Cloud Library, est une bibliothèque de logiciels open source écrite en C++ qui permet de traiter et manipuler des nuages de points. Cette bibliothèque est largement utilisée dans les domaines de la robotique et de la vision par ordinateur pour traiter des données 3D complexes.
Les technologies de détection d'images stéréo utilisent deux caméras pour calculer la profondeur et permettre aux appareils de voir, comprendre, interagir et apprendre de leur environnement.